The project required to estimate the position of a moving object given noisy Lidar and Radar measurements. It was a part of the Self-Driving Car Engineer Nanodegree in Udacity.
This was a fill-in-the-gaps style task, with a part of the C++ code already given. The tasks involved such tasks as filling in the Jacobian calculation functions, converting from Cartesian to Polar coordinates and allocating the necessary data structures.
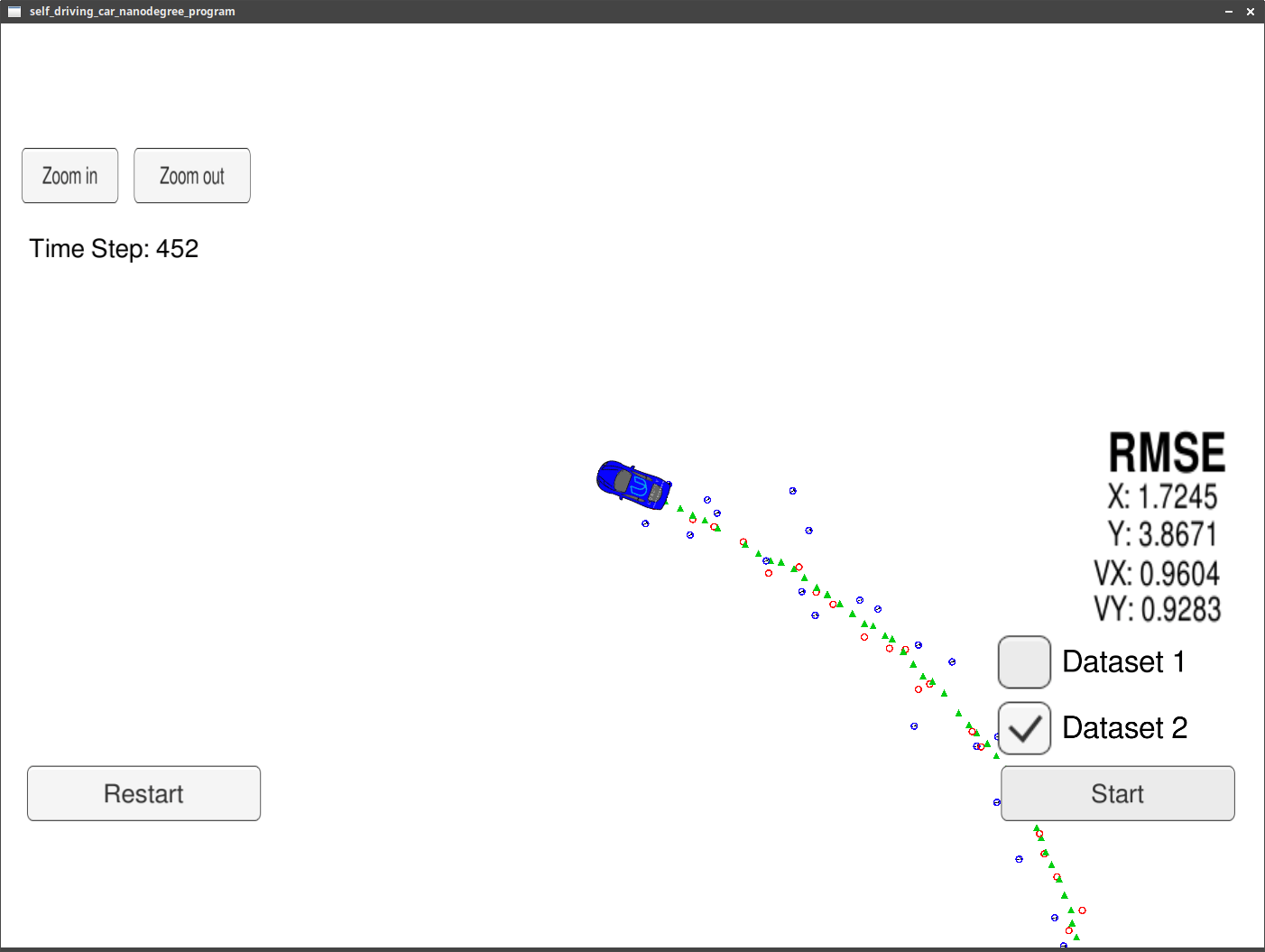
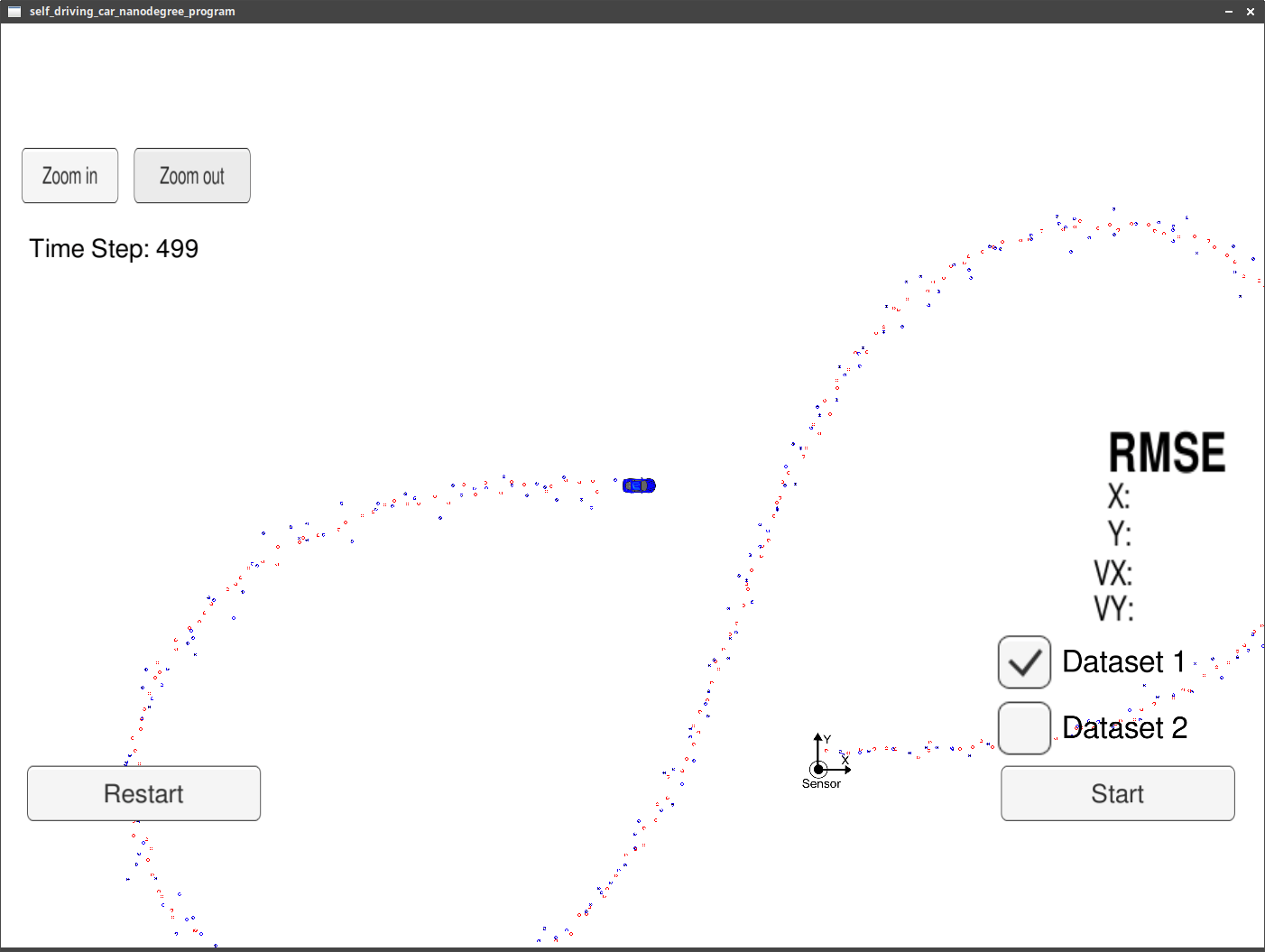
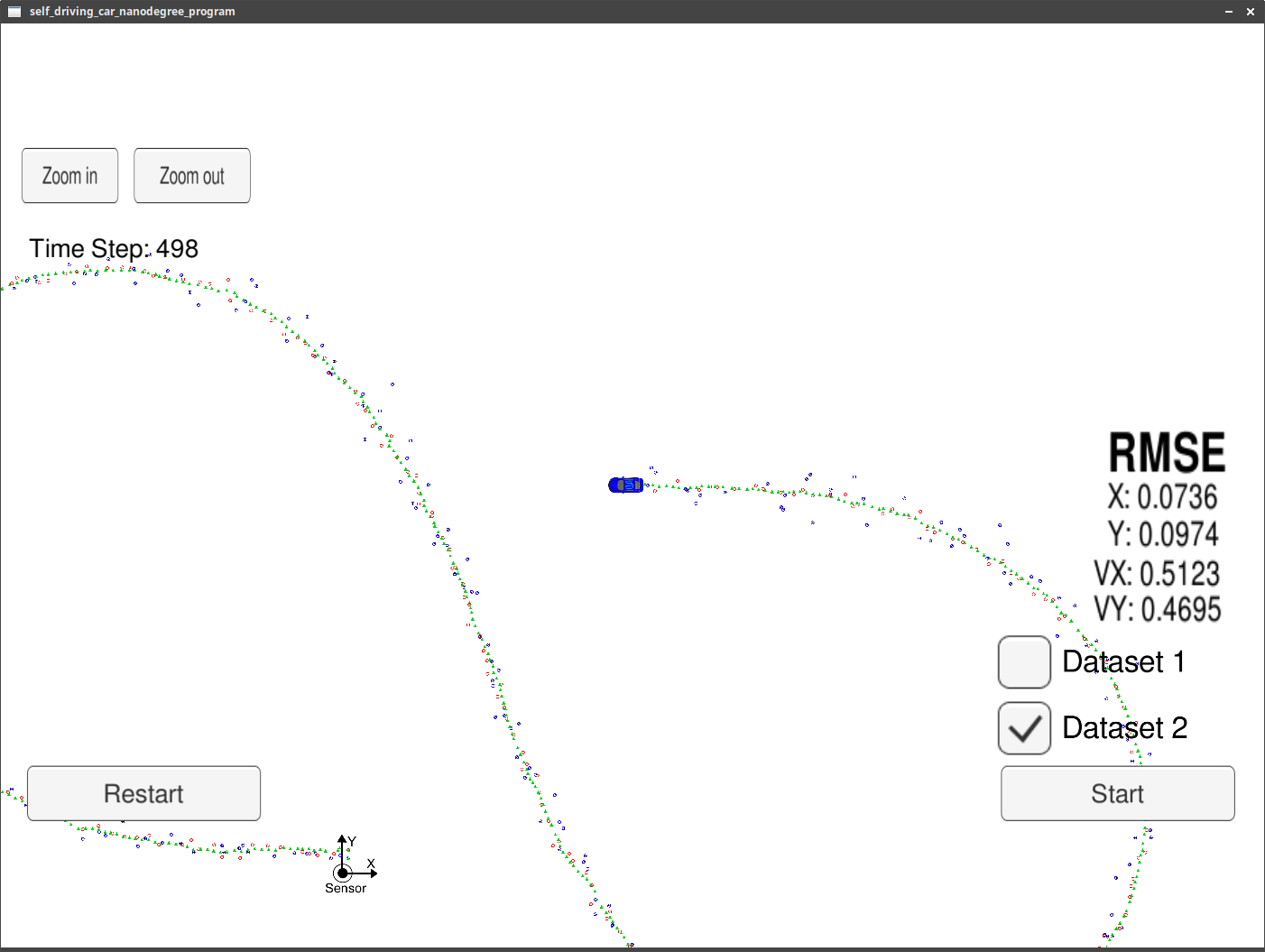
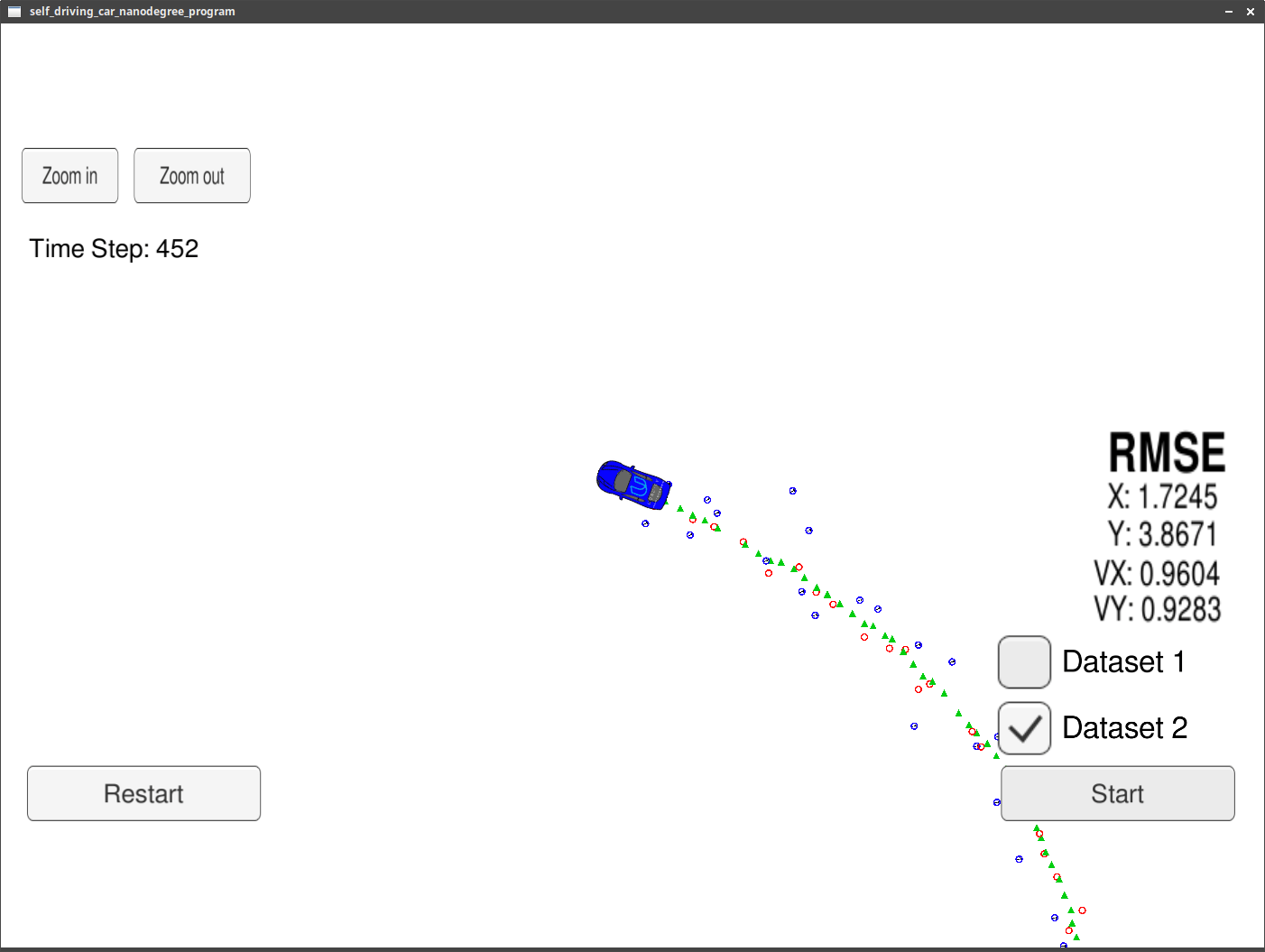
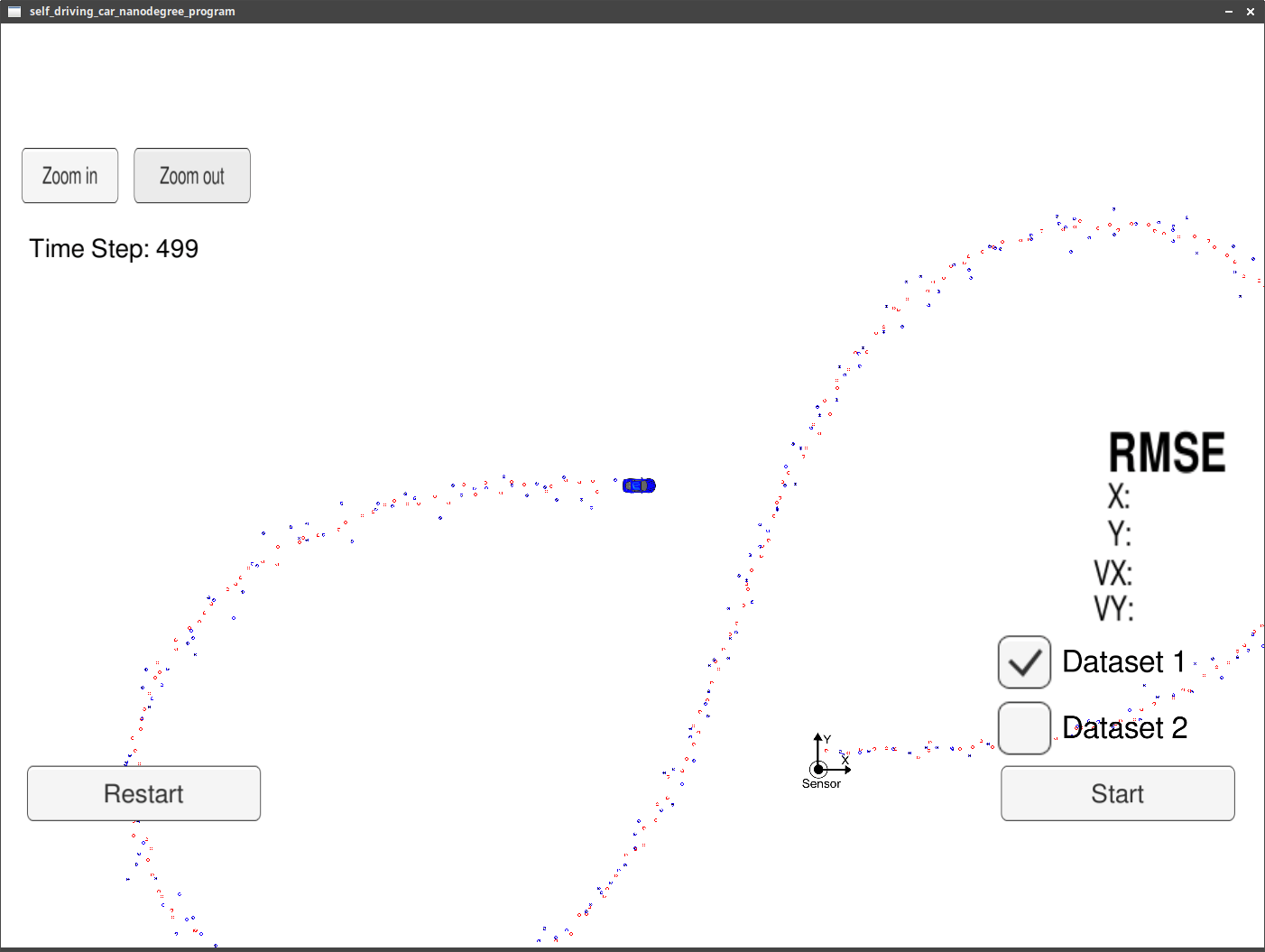
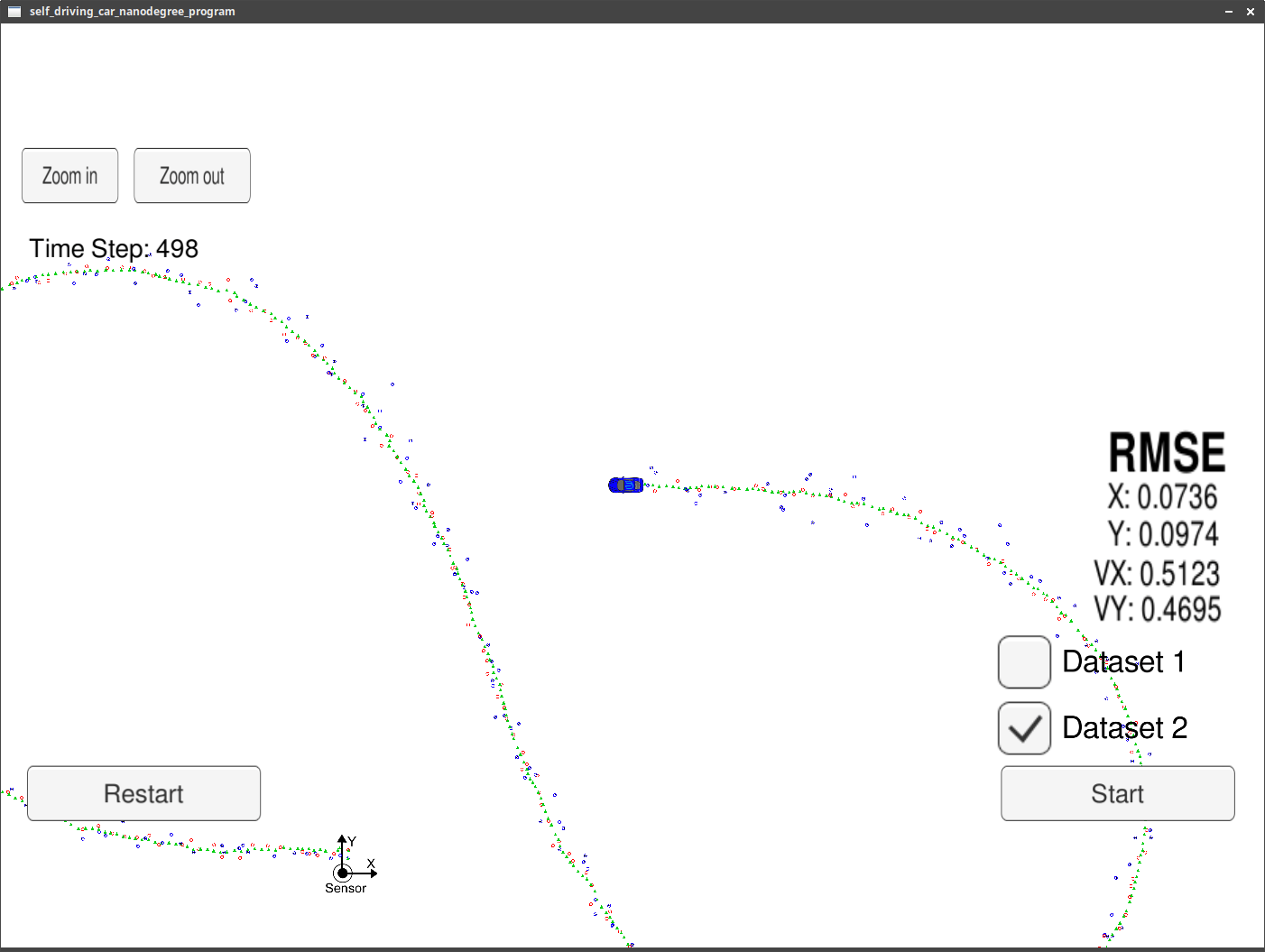
Ultimately, I managed to obtain the results that were expected.
Code Repository: GitHub